Answer:

Step-by-step explanation:
Torque is given by

Note that this is a cross product of vectors. To perform a cross product, we need to express the vectors in three components.


The torque is then
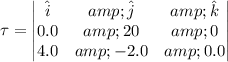

(I'm not sure if the matrix will appear well because I'm constrained with the device I'm using but what I'm showing is the determinant of a matrix with i, j, k in the first row, the coefficients of F in the second and the coefficients of r in the third)